Un
gruppo di matematici dell'IAC-CNR ha collaborato con una PMI italiana nella
creazione di un'applicazione per smartphone capace di dare indicazioni
sull'evoluzione dello stato del traffico per tempi dell'ordine della mezz'ora.
Se utilizzata anche solo sul 2% delle vetture, questa applicazione potrebbe
fornire previsioni affidabili e suggerimenti su come ottimizzare i tempi di
percorrenza, con un deciso abbattimento dei consumi e dell'inquinamento.
Cerchiamo di capire meglio in cosa consiste il contributo dei matematici.
MODELLI MATEMATICI DEL TRAFFICO
La storia della trattazione matematica del traffico ha inizio nel
1955-56, con la pubblicazioni di
M. J. Lighthill e G. B. Whitham
e, indipendentemente, di P.I. Richards, sulle onde di traffico su strade lunghe
e affollate. In quegli anni il numero dei veicoli era molto aumentato e, per
cercare di gestire le numerose situazioni di congestione del traffico che si
presentavano quotidianamente, si cominciò a elaborare dei modelli che
permettessero di prevedere la lunghezza delle code sulle autostrade e la
sincronizzazione ottimale dei semafori.
L'idea di Lighthill-Whitham-Richards
era tutto sommato abbastanza semplice: trattiamo il flusso di veicoli come se
fosse un liquido.
Supponiamo di metterci su di una strada abbastanza lunga,
senza incroci e possibilità di parcheggiare, per cui il numero totale N(t1) dei veicoli circolanti
in un determinato tratto di strada e in un dato istante t1, sarà dato dallo stesso numero in un istante
precedente t0 più la
differenza tra il flusso F(E(tra t0 e t1))
delle macchine entrate nel tratto di strada e quello F(U(tra t0 e t1)) di quelle uscite nel
periodo di tempo trascorso. Qualche cosa del tipo:
N(t1)=N(t0)+F(E(tra t0 e t1))-F(U(tra t0 e t1))
Partendo da questa identità di base, che non presuppone di conoscere cosa fanno nel dettaglio le singole vetture istante per istante, è possibile sviluppare un modello matematico alle derivate parziali, detto modello LWR, abbastanza realistico dell'evoluzione nel tempo della densità dei veicoli, ossia il numero di veicoli per tratto di strada. Il punto critico di questo modello è nel riuscire a descrivere in modo realistico la velocità media dei veicoli in funzione della situazione del traffico.
La
cosa più semplice è quella di dire che in media questa velocità sarà data da
una funzione descrescente della densità dei veicoli: se non c'è nessuno si può
andare alla massima velocità, rispettando ovviamente il limite imposto dal
regolamento stradale in quel punto (per esempio 50 Km/h in città).
Se ci sono
altre macchine, la nostra velocità verrà influenzata dalla loro presenza: più i
veicoli saranno vicini tra loro e più saremo costretti a rallentare, fino a
doverci fermare quando i nostri paraurti saranno praticamente a contatto. Se
indichiamo con ρ la densità di veicoli, allora il valore della velocità v
in funzione di questa densità avrà un aspetto simile a quello del grafico a
sinistra in Figura 1. Anche se la realtà è abbastanza diversa dalla teoria, il
diagramma a destra mostra che i dati sperimentali non sono poi così lontani
nell'andamento qualitativo.
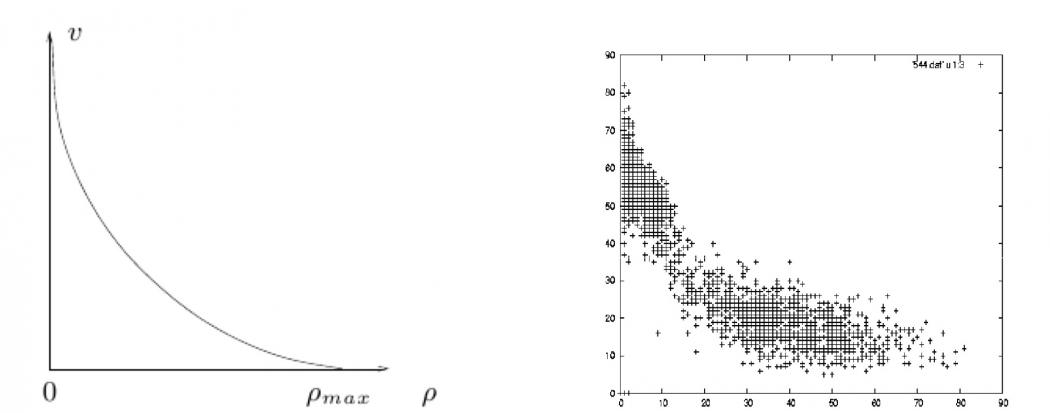
Figura 1: possibile diagramma delle velocità in funzione della densità dei veicoli (a sinistra) e i corrispondenti dati dei rilevamenti sperimentali sperimentali (a destra, in ordinata le velocità rilevate, in ascissa la corrispondente densità di veicoli).
SERIE STORICHE O MODELLI MATEMATICI?
Quando si hanno a disposizione molti dati, è naturale cercare delle 'regolarità' nascoste in essi. Guardate ad esempio la Figura 2, in cui sono riportati dei dati reali di traffico automobilistico catturati da sensori GPS montati sui veicoli. La posizione di ogni cerchio indica una particolare posizione e un particolare orario. La grandezza ed il colore dei cerchi denotano la velocità del veicolo. La zona più scura a sinistra indica una grande congestione, con code che hanno raggiunto i 9 km di lunghezza e si sono protratte per più di un'ora e mezza.
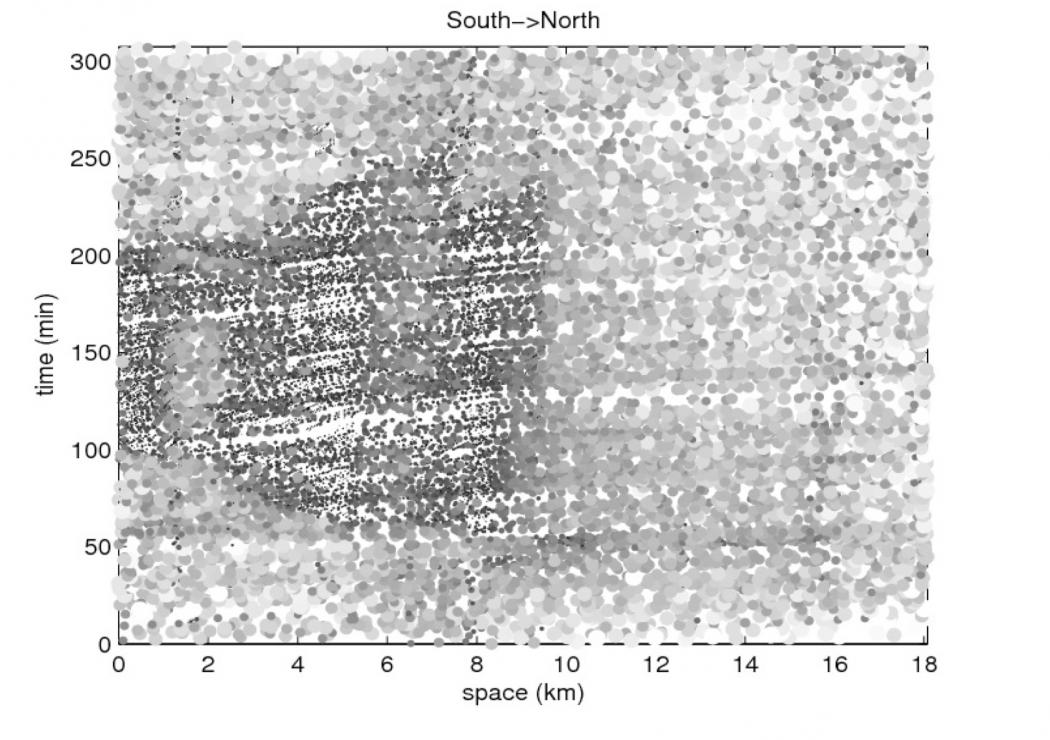
Figura 2: Diagramma di dati reali di traffico veicolare con strumenti GPS a bordo dei veicoli. In ascissa la distanza percorsa (in chilometri), in ordinata il tempo (in minuti) e la grandezza dei cerchi è inversamente proporzionale alla velocità del veicolo.
Se nelle serie storiche certe configurazioni si ripetono nel
tempo, è possibile estrapolare delle informazioni utili per i viaggiatori. Di
solito però, affinché i dati mostrino una certa regolarità, essi devono essere
ben catalogati, ad esempio per fascia oraria, giorno della settimana, mese
dell'anno, condizioni atmosferiche, eventi speciali, etc. Qui si pone la
questione se il traffico segua leggi “regolari”. Se avete mai sentito
pronunciare la frase “Se parto un minuto dopo arrivo un'ora dopo”, saprete che
la risposta è NO. Il traffico è solo in parte un fenomeno regolare, perché
risponde anche a leggi di tipo “caotico”, che rendono molto difficile associare
ad un certo dato iniziale un comportamento a breve termine.
I modelli matematici per il traffico veicolare hanno lo
scopo di prevedere l'andamento del traffico, a partire da una certa
configurazione iniziale dei veicoli, cioè da una “fotografia” dello stato
attuale delle strade.
Senza fare uso di dati storici, i modelli matematici
codificano il comportamento dei guidatori in equazioni che vengono poi risolte
con particolari metodi matematici ed informatici.
Il parallelo con la
meteorologia è d'obbligo, con la sola differenza che se una previsione
meteorologica a 3 giorni è possibile, nel caso del traffico è difficile
superare la soglia temporale di un'ora per avere una previsione affidabile,
anche in presenza di dati iniziali molto completi.
Grazie ai modelli matematici è possibile prevedere il traffico
anche nel caso di eventi inattesi, come ad esempio gli incidenti. Nel momento
in cui una coda si comincia a formare, il modello è in grado di prevederne
l'evoluzione, cioè la velocità di allungamento e successivamente descrivere il
suo smaltimento. È inoltre possibile simulare scenari virtuali, come la
chiusura di alcune strade, la messa in opera di un nuovo semaforo o di una
rotatoria, per studiarne, a costo zero, la fattibilità e la convenienza.
SCALE DI OSSERVAZIONE
Un fenomeno può essere osservato a diverse scale, con conseguente attenzione a particolari differenti, vedi Figura 3.

A livello della singola macchina, e del singolo guidatore, il comportamento è principalmente influenzato da quello del veicolo che precede. In modo simile ad una molla, se il veicolo che precede accelera, il veicolo che segue farà altrettanto, e vice versa. Se non ci sono veicoli che precedono, si mantiene una velocità di crociera che dipende dai singoli e guidatori, e dai limiti di velocità.
I modelli che descrivono il traffico con questa scala sono detti “microscopici”: ad ogni veicolo si associa un'equazione diversa, a volte dividendo i veicoli in diverse tipologie e assegnando caratteristiche diverse a ognuna di esse (guidatori prudenti o frettolosi, esperti o esitanti, mezzi lunghi e corti, ecc...).
A un livello di osservazione più “alto”, invece, non è più possibile riuscire a determinare le posizioni di tutti i veicoli coinvolti. In questo caso il modello, di tipo “macroscopico” o “fluidodinamico”, caratterizzato da un'unica equazione che descrive la situazione, fa solamente riferimento alla densità media dei veicoli.
In pratica, il modello dà un'informazione sul grado di congestione delle strade monitorate.
Si potrebbe osservare però che un modello fluidinamico non è il modello matematico più naturale che possiate immaginare per descrivere il traffico, perchè considera i veicoli come particelle di un fluido.
Ognuno sembra infatti libero di poter fare quello che vuole, anche fermare la macchina in mezzo alla strada, scendere e continuare a piedi. Proprio per questo a molti studiosi piacciono i modelli microscopici con cui tenere conto della grande varietà di tipologie di veicoli e delle piccole fluttuazioni dovute a effetti casuali. D'altra parte, più scendiamo nel dettaglio e più i modelli sono difficili da calibrare sui dati sperimentali. Quello che succede è che i dati che emergono al livello di questo regime microscopico — la vecchietta che si ferma sulle strisce, il tizio che va sulla corsia preferenziale, il pensionato che procede a venti all'ora — sono difficili da considerare e forse non influiscono poi così tanto, magari alla fin fine si mediano nel comportamente automatico che ci spinge a guidare, quasi tutti, seguendo il flusso e il buon senso.
Questo tipo di nodi modellistici — micro/macro, discreto/continuo — sono difficili da sciogliere e spesso hanno soluzione solo in situazioni molto precise. Su un singolo incrocio forse è meglio micro, su una rete di 6500 archi come quella di Roma, allora forse è meglio macro. In generale, i matematici propongono delle ipotesi di lavoro, che magari colgono solo una parte della complessità del problema, e poi cercano di capire se il fenomeno che vogliono descrivere è catturato o meno da queste ipotesi. Insomma, solo l'ambito applicativo e soprattutto l'analisi dei dati sperimentali, confrontati con i risultati delle simulazioni, può aiutarci a decidere quale delle due teorie sia più utile e in quali situazioni.
STRADE E RETI
Utilizzando dati sperimentali è possibile costruire funzioni più realistiche per la velocità in funzione della densità, che permettono di simulare flussi di traffico quantitativamente simili ai flussi reali e in ogni modo altri modelli (modelli del secondo ordine, transizioni di fasi, etc...) sono stati sviluppati nel corso degli anni per migliorare l'aderenza alla realtà.
C'è però ancora un ostacolo, ed è quello costituito dal fatto che fino a qui abbiamo ipotizzato di lavorare su di un tratto di strada isolato. In realtà le strade formano una rete molto ben interconnessa, con svincoli, incroci e rotatorie, e si è posto quindi il problema di estendere la teoria precedente a questa nuova situazione.
Un gruppo di ricerca di matematici dell'Istituto per le Applicazioni del Calcolo “M. Picone” del CNR ha lavorato sull'estensione del modello fluidodinamico LWR alle reti stradali.
Con questa nuova teoria è diventato di colpo possibile simulare un'intera rete.
Qui in Figura 4, per esempio, trovate cosa si può fare nel caso di un una rotatoria (quella di Piazza Re di Roma, a Roma) avendo stabilito certe regole di precendenza agli incroci. Simulando un flusso anche moderato sulle strade affluenti nella rotatoria (30% del flusso massimo), si vede come, in breve tempo, si possono creare delle code di congestione nella rotatoria e sulle stesse strade entranti (in viola e poi in blu molto scuro). Usando questo metodo si può ad esempio determinare quando e come una rotatoria con precedenza sia più conveniente di un semaforo.
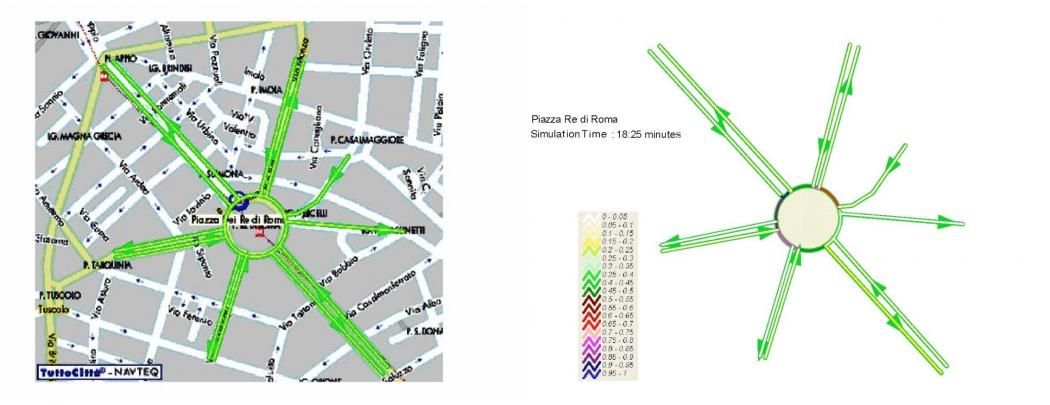
Figura 4: Immagine della rotatoria di piazza Re di Roma (Roma) e risultato della simulazione corrispondente che utilizza il modello fluidodinamico su rete.
L'ESPERIENZA INDUSTRIALE
Con questo bagaglio teorico, nutrito da numerose esperienze sul
campo, i matematici del CNR sono riusciti a creare, in collaborazione con una
PMI italiana specializzata in progettazione, realizzazione e
manutenzione di software, un'applicazione per smartphone in grado di predire in
tempo reale l'evoluzione del traffico. Il funzionamento di questa applicazione
si svolge nel modo seguente. Una volta installata l'applicazione, gli utenti si
impegnano ad attivare il sistema di rilevamento GPS nel momento in cui sono
alla guida.
I dati raccolti sulla posizione ogni pochi secondi dei veicoli
dotati di questo sistema concorrono ad alimentare in tempo reale una database
che ha sua volta aggiorna lo stato di densità di veicoli sull'intera rete.
A
partire da questo dato, il modello fluidodinamico, in una sua versione
opportunamente elaborata per questo intervento specifico, calcola l'evoluzione
dell'intero sistema urbano nell'ora successiva. Questo permette agli utenti di
disporre di percorsi ottimali di percorrenza ottenuti conoscendo lo stato della
rete nell'immediato futuro. L'applicazione è attualmente funzioante e nello
stato corrente di validazione. Questo tipo di interazioni tra sensori diffusi
(in questo caso smartphone) e simulazioni numeriche apre quindi nuovi scenari
per la gestione degli scenari urbani.
Roberto Natalini sarà tra i relatori Pillole di scienza. Cinque formule di sostenibilità, in programma il 13 luglio a Expo 2015 (vedi locandina)
Testo pubblicato nel volume "MaTeinItaly. Matematici alla scoperta del futuro", casa editrice EGEA
PER APPROFONDIRE:
[1] https://sites.google.com/site/iactrafficmodels/
[2] G.
Bretti, M. Briani, E. Cristiani, An easy-to-use numerical approach for
simulating traffic flow on networks: Numerical experiments, Discrete and
Continuous Dynamical Systems – Series S, in pubblicazione.
[3] G.
Bretti, R. Natalini, B. Piccoli, A fluid-dynamic traffic model on road
networks, Archives of Computational Methods in Engineering 14 (2007), 139-172.
[4] G.
Bretti, B. Piccoli, A tracking algorithm
for car paths on road networks, “SIAM Journal on Applied Dynamical Systems” (SIADS)
, vol. 7 (2008), 510-531.
[5] S.
Blandin, G. Bretti, A. Cutolo, B. Piccoli, Numerical simulations of traffic
data via fluid dynamic approach, Appl. Math. Comput., vol. 210 (2009), 441-454.
[6] E.
Cristiani, C. de Fabritiis, B. Piccoli, A fluid dynamic approach for traffic
forecast from mobile sensor data, Commun. Appl. Ind. Math., 1 (2010), 54-71.
[7] E.
Cristiani, B. Piccoli, A. Tosin, Multiscale modeling of granular flows with
application to crowd dynamics, Multiscale Model. Simul., 9 (2011), 155-182.
[8] E.
Cristiani, B. Piccoli, A. Tosin, How can macroscopic models reveal
self-organization in traffic flow?, Proc. 51st IEEE CDC (Maui, Hi, Dec. 2012).
[9] B.
Piccoli and M. Garavello, Traffic flow on networks, AIMS on Applied
Mathematics, vol. 1, 2006.
[10] M.
J. Lighthill, G. B. Whitham. On kinetic waves. II. Theory of traffic flows on
long crowded roads.
Proc. Roy. Soc. London Ser. A, 229(1955), 317-345.
[11] P.
I. Richards. Shock waves on the highway. Oper. Res., 4 (1956), 42-51.
