La Luna ha una faccia nascosta, e difficile da studiare. Ma alle lacune che abbiamo sta ponendo egregiamente rimedio la missione cinese Chang’e 4, con il suo rover Yutu 2 (nome significa “Coniglio di giada” e ricorda il mitologico coniglio che nelle tradizioni orientali abiterebbe sulla Luna), che, in uno studio recentemente pubblicato su Science Advances, ha permesso di determinare la stratigrafia del sottosuolo lunare.
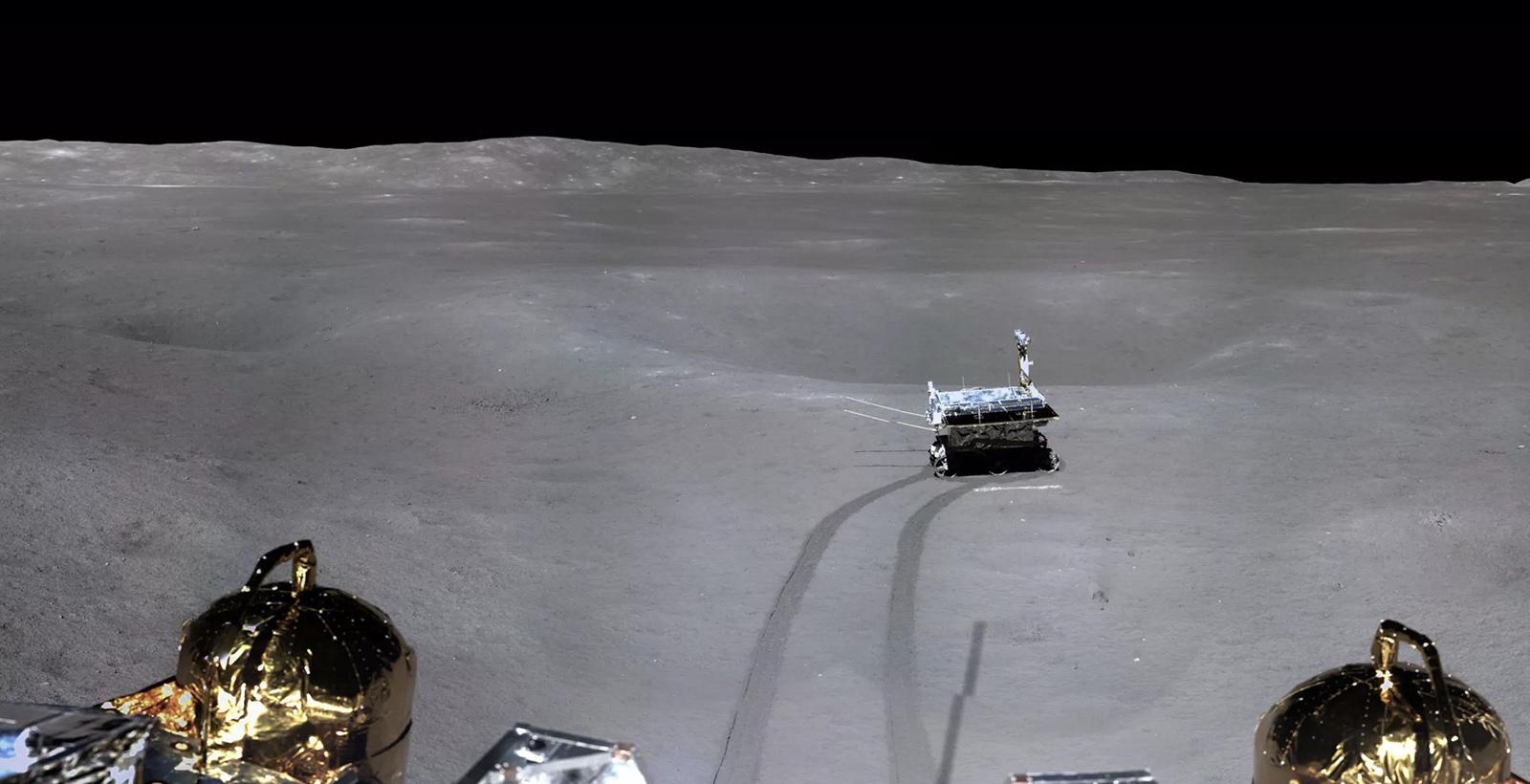
Nell'immagine: il rover cinese Yutu-2 è appena sceso dalla piattaforma di Chang'e 4 e inizia la sua esplorazione sulla faccia nascosta della Luna. Tra gli obiettivi scientifici della missione figura l’indagine radar del sottosuolo lunare. L’immagine risale al 3 gennaio 2019, una dozzina d’ore dopo il perfetto allunaggio della sonda. Crediti: CNSA
I dati raccolti dal georadar di Yutu-2, il rover cinese operativo da poco più di un anno nel cratere Kármán posto all’interno del grande bacino d’impatto che caratterizza il Polo Sud della Luna, hanno permesso a un gruppo di ricercatori cinesi e italiani di determinare la stratigrafia del sottosuolo lunare. È la prima volta che si è potuto ottenere una ricostruzione delle strutture geologiche presenti fino a una profondità di 40 metri nel sottosuolo della parte nascosta del nostro satellite. L’importante studio è stato pubblicato in questi giorni sulle pagine di Science Advances.
Le due facce della Luna
La situazione dinamica che lega Terra e Luna – tecnicamente si parla di rotazione sincrona o, all’inglese, di tidal locking – fa sì che il nostro satellite ci mostri sempre la medesima faccia. Una faccia che, gradatamente, scompare e ricompare per il ciclo delle fasi lunari, ma che rimane sempre identica. L’effetto delle librazioni ci permette di spingere il nostro sguardo anche su alcune regioni solitamente invisibili, ma almeno il 40% dell’intera superficie lunare ci è rimasto assolutamente sconosciuto fino al 10 ottobre 1959, quando la sonda sovietica Luna 3 sorvolò la faccia nascosta mostrandoci per la prima volta quei panorami.
Fin dalle prime immagini si vide che l’aspetto dei due emisferi è molto differente: mentre quello visibile da Terra appare ricco di vasti bacini scuri (i cosiddetti “mari”) contornati da terreni più chiari e in generale più elevati (per questo chiamati “altopiani”), l’emisfero nascosto appare sostanzialmente privo di mari. Questa dicotomia superficiale, però, riflette anche differenze più profonde. La crosta della faccia rivolta verso Terra è più sottile e i mari sono vastissime distese di roccia basaltica, più povera di elementi volatili e più ricca di ferro, titanio e magnesio rispetto ai basalti terrestri; al contrario, la crosta della faccia più lontana dalla Terra è più spessa e il materiale che la compone è prevalentemente roccia anortositica, materiale molto antico che risale all’epoca della formazione della Luna. L’età di alcune anortositi raccolte nelle regioni degli altopiani e portate a Terra dalle missioni lunari è risultata di circa 4,3 miliardi di anni, facendo di tali campioni le più antiche rocce lunari analizzate.
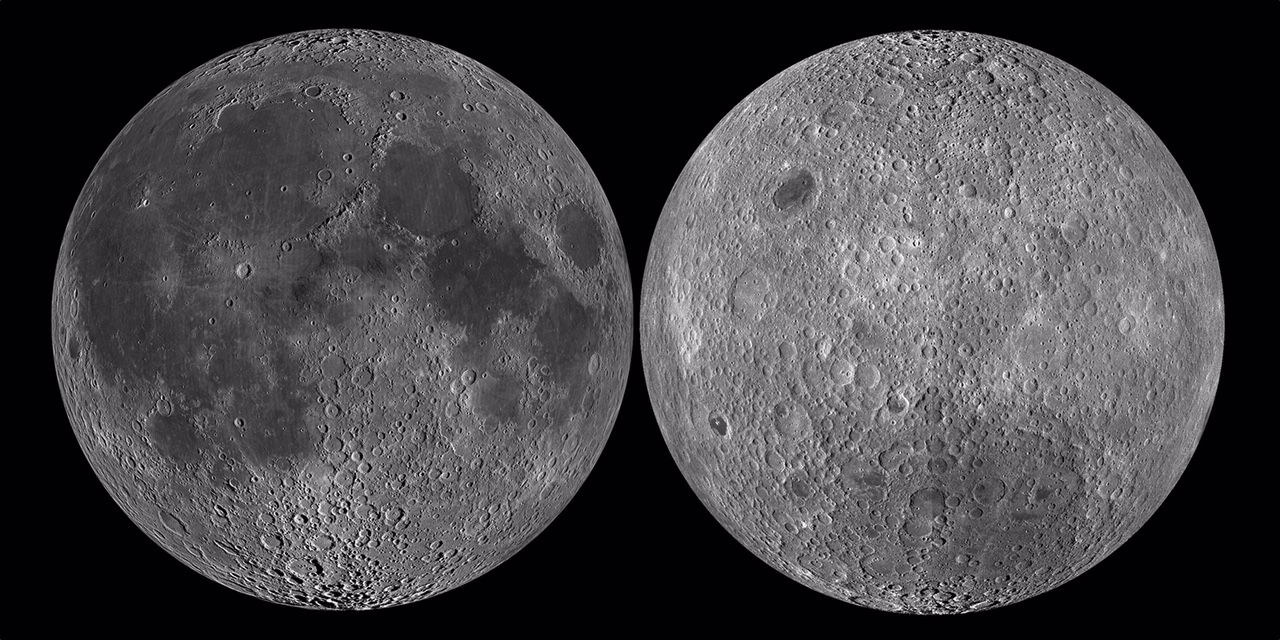
Molto evidente, in queste panoramiche del Lunar Reconnaissance Orbiter, l’abissale differenza tra l’emisfero della Luna costantemente rivolto verso la Terra (a sinistra) e quello a noi sempre nascosto (a destra). Immagini acquisite dalla WAC (Wide Angle Camera) nel dicembre 2010. Crediti: Arizona State University/LRO
Certamente meno immediato ricostruire la stratigrafia del sottosuolo lunare. Per la faccia visibile si sono acquisite importanti conoscenze sia esaminando la distribuzione dei terreni, sia attingendo alle informazioni provenienti dalle missioni lunari. Allo studio dei campioni di rocce lunari (oltre 380 kg di rocce) riportati dalle missioni con equipaggio della NASA e dalle sonde automatiche sovietiche si sono affiancate con successo tecniche geofisiche quale, per esempio, l’impiego di onde sismiche, metodo testato con successo durante le missioni Apollo.
Negli ultimi vent’anni l’impiego del georadar, noto anche come GPR (Ground Penetrating Radar), collocato a bordo di sonde spaziali e rover è progressivamente diventata la tecnica geofisica più adatta per studiare la stratigrafia dei sottosuoli planetari. Già negli anni Settanta un radar dedicato (Lunar Sounder Experiment) aveva equipaggiato la missione Apollo 17 della NASA e nel 2007 veniva lanciata dall’Agenzia spaziale giapponese JAXA la missione Kaguya con a bordo il Lunar Radar Sounder, strumenti che sono stati in grado di svelarci la struttura del sottosuolo lunare fino a una profondità da 1 a 2 km.
Molto più incomplete, per evidenti motivi, le informazioni riguardanti il lato nascosto del nostro satellite. A tale lacuna, però, sta egregiamente rimediando la missione cinese Chang’e 4 e il suo rover Yutu-2.
Yutu, il Coniglio di giada
La missione Chang’e 4 è la naturale continuazione del programma cinese di esplorazione diretta della superficie lunare iniziato a fine 2013 con la missione Chang’e 3. Dopo i due orbiter Chang’e 1 e 2, il programma prevedeva il dislocamento di un rover sulla superficie visibile della Luna (Sinus Iridum). Purtroppo, dopo solamente qualche settimana di lavoro, il rover Yutu, il cui nome significa “Coniglio di giada” e ricorda il mitologico coniglio che nelle tradizioni orientali abiterebbe sulla Luna, è stato bloccato da problemi meccanici e non ha potuto portare a termine la sua missione.
Per il nuovo assalto alla Luna, l’Agenzia spaziale cinese ha pensato a una destinazione più complessa, scegliendo di allunare sul lato nascosto del nostro satellite. Operazione perfettamente riuscita: lancio 7 dicembre 2018, allunaggio 3 gennaio 2019 e immediato dispiegamento del rover Yutu-2. Il rover ha una massa di 140 kg, è grande poco più di una lavatrice e produce l’energia elettrica necessaria alla sua strumentazione con due pannelli fotovoltaici. Dato che sia il rover che il lander devono affrontare le bassissime temperature delle lunghe notti lunari, sono equipaggiati con un’apposita unità di riscaldamento a radioisotopi. Oltre a una fotocamera panoramica in grado di ruotare di 360° e di acquisire immagini 3D, Yutu-2 dispone di uno spettrometro ottico con sensibilità dal visibile al vicino infrarosso e di un analizzatore di atomi elettricamente neutri (ENA – Energetic Neutral Atom) fornito dallo Swedish Institute of Space Physics per studiare come il vento solare interagisce con la superficie lunare.
Lo strumento di Yutu-2 che, finora, ha data maggiori risultati è indubbiamente il georadar per lo studio della stratigrafia del sottosuolo lunare. Lo strumento è in grado di arrivare a circa 30 m di profondità con una risoluzione verticale di 30 cm oppure spingersi fino a 100 m con risoluzione di 10 m. Le scoperte sulla composizione del sottosuolo nella regione in cui sta operando il rover, pubblicate nei giorni scorsi su Science Advances da Chunlai Li (Chinese Academy of Sciences) e collaboratori, sono proprio dovute ai dati raccolti dal georadar di Yutu-2.
I ricercatori si sono stupiti per le incredibili proprietà di quei terreni lunari: «Quello che ci ha più sorpreso – ha dichiarato Elena Pettinelli (Università Roma Tre), direttamente coinvolta nello studio – è la straordinaria trasparenza del terreno alle onde radio che ci ha permesso di vedere distintamente le strutture geologiche fino a 40 metri di profondità. Una cosa assolutamente impossibile da ottenere sulla Terra a quella frequenza a causa della onnipresenza di acqua liquida nel sottosuolo».
Tutt’altro che semplice l’interpretazione dei dati radar, come rimarcano gli altri due membri italiani del team. «Abbiamo dovuto lavorare sodo all’analisi dei dati per estrarre le informazioni riguardanti i dettagli della stratigrafia e, soprattutto, per evitare errori nell’interpretazione dei dati», ha dichiarato Sebastian Lauro (Università degli studi Roma). Gli fa eco Francesco Soldovieri (Cnr-Irea): «Alla fine abbiamo individuato l’algoritmo giusto e, applicando un approccio noto come inversione tomografica, siamo riusciti a individuare la presenza dei tipici prodotti di impatto sotto uno spesso strato di regolite».
Le conclusioni cui giunge lo studio suggeriscono che il sottosuolo lunare nel cratere Kármán (una struttura da impatto di circa 180 km posta all’interno del bacino Polo Sud-Aitken) è costituito fino a 12 metri di profondità da regolite (con questo termine viene indicato il materiale incoerente, fatto di pietrisco e polvere, che forma il suolo lunare). Si tratta dunque di materiale estremamente poroso, molto fine e granuloso nel quale sono occasionalmente disperse rocce più grandi. Lo strato immediatamente sottostante, fino a 24 metri di profondità, è caratterizzato da un aumento di queste rocce più grandi, con dimensioni anche di 1 metro, derivanti dalle espulsioni di materiale dai crateri vicini in occasione dell’impatto che li ha originati. Nell’ultimo strato individuato dal georadar (da 24 a 40 metri di profondità) la presenza di massi diminuisce considerevolmente e il materiale roccioso è essenzialmente localizzato nella parte più alta.
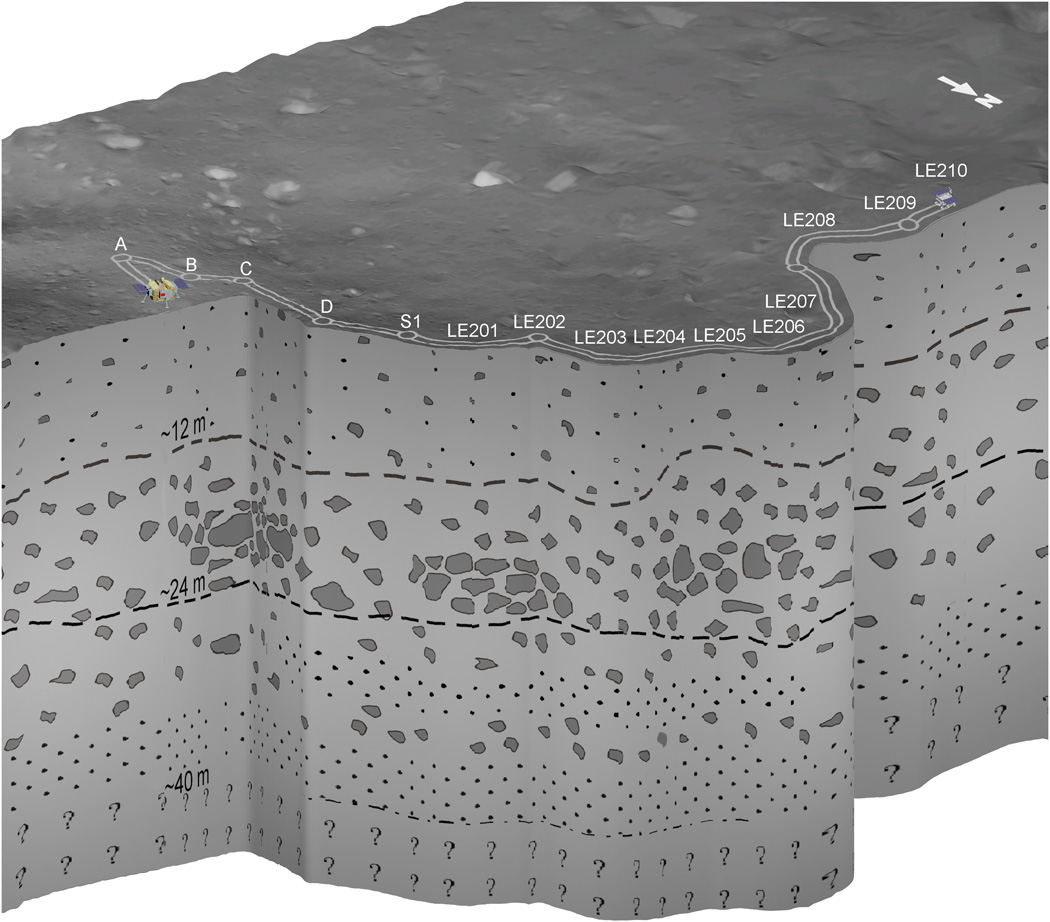
Rappresentazione schematica della struttura geologica del sottosuolo nel sito di atterraggio di Chang’E-4 dedotta dai dati raccolti dal rover Yutu-2. Il sottosuolo può essere diviso in tre stratificazioni: la prima, fino a 12 m di profondità, è costituita dalla regolite lunare; la seconda, da 12 a 24 m di profondità, è costituita da materiali più grossolani con rocce incorporate; la terza, da 24 a 40 m di profondità, contiene strati alternati di materiali grossolani e fini. Crediti: Chunlai Li et al. - Science Advances
Nello studio i ricercatori non mancano di rimarcare come la mancanza di un segnale radar rilevabile a una profondità superiore ai 40 metri non permetta di trarre conclusioni definitive sulle proprietà dei materiali sottostanti. Sono però dell’idea che i materiali granulari si estendano anche al di sotto di tale profondità e che lo strato di basalto che costituisce il fondo solido del cratere si trovi molto più in profondità.
Risultati come quelli ottenuti nella zona di allunaggio di Chang’e 4 assumono particolare significato in vista del ritorno dell’uomo sulla Luna, ritorno che da più parti si dà ormai per imminente. Ipotizzare un insediamento umano sul nostro satellite comporta la necessità di utilizzare e riciclare le risorse presenti sulla Luna. A partire da quelle fondamentali, quali l’acqua dal ghiaccio e l’ossigeno dalla regolite lunare. Disporre, grazie ad accurate esplorazioni geofisiche, di dati affidabili e completi sulla distribuzione di tali risorse diventa dunque di vitale importanza per un futuro insediamento sul nostro satellite.
